Loading...
Searching...
No Matches
FreeRTOS-based LED test application for the Pico 2 W board. More...
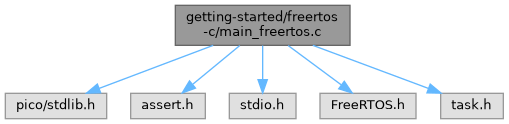
#include "pico/stdlib.h"#include <assert.h>#include <stdio.h>#include <FreeRTOS.h>#include <task.h>
Include dependency graph for main_freertos.c:
Macros | |
| #define | LED_DELAY_MS 100 |
Functions | |
| int | pico_led_init (void) |
| Initialize the board-specific LED backend. | |
| void | pico_set_led (bool led_on) |
| Set the onboard LED state. | |
| static void | led_task (void *argument) |
FreeRTOS task that blinks the onboard LED at LED_DELAY_MS. | |
| static void | log_task (void *argument) |
| Low-priority FreeRTOS task for periodic logging. | |
| int | main () |
| Application entry point. | |
Detailed Description
FreeRTOS-based LED test application for the Pico 2 W board.
This C source is intended for testing a Pico 2 W board by blinking the onboard LED using the Pico C SDK and FreeRTOS. It configures LED control for either:
- boards with a direct LED GPIO (
PICO_DEFAULT_LED_PIN), or - Pico W style boards where the LED is controlled through the CYW43 Wi-Fi chip (
CYW43_WL_GPIO_LED_PIN).
Two FreeRTOS tasks are created:
led_task(): toggles the LED periodically.log_task(): prints a periodic low-priority status message.
Macro Definition Documentation
◆ LED_DELAY_MS
| #define LED_DELAY_MS 100 |
Function Documentation
◆ led_task()
|
static |
FreeRTOS task that blinks the onboard LED at LED_DELAY_MS.
Usage:
- Created from
main()usingxTaskCreate(). - Runs forever and alternates LED ON/OFF with
vTaskDelay().
- Parameters
-
argument Unused task argument.
Here is the call graph for this function:

◆ log_task()
|
static |
Low-priority FreeRTOS task for periodic logging.
Usage:
- Created from
main()with lower priority thanled_task(). - Runs forever and prints a heartbeat log every 1 second.
- Parameters
-
argument Unused task argument.
◆ main()
| int main | ( | void | ) |
Application entry point.
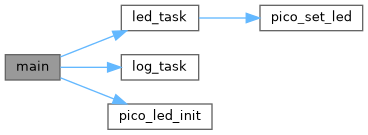
Startup sequence:
- Initialize stdio (
stdio_init_all()). - Initialize LED backend (
pico_led_init()). - Create FreeRTOS tasks (
led_task()andlog_task()). - Start scheduler (
vTaskStartScheduler()).
Usage:
- Build this target with Pico SDK + FreeRTOS support.
- Flash to supported hardware (including Pico 2 W) to validate LED and scheduler/task behavior.
- Returns
- Never returns under normal operation.
Here is the call graph for this function:
◆ pico_led_init()
| int pico_led_init | ( | void | ) |
Initialize the board-specific LED backend.
Usage:
- Call once during startup before any call to
pico_set_led(). - In
main(), the return value is checked withhard_assert()to ensure initialization succeeded.
- Returns
PICO_OKon success for GPIO-based boards, or the result ofcyw43_arch_init()for Pico W style boards.
Here is the caller graph for this function:

◆ pico_set_led()
| void pico_set_led | ( | bool | led_on | ) |
Set the onboard LED state.
This function abstracts the hardware difference between direct GPIO LED control and CYW43-controlled LED GPIO on Pico W style boards.
Usage:
- Call after
pico_led_init()succeeds. - Pass
trueto turn the LED on,falseto turn it off.
- Parameters
-
led_on Desired LED state ( true= on,false= off).
Here is the caller graph for this function:
