C++ FreeRTOS LED test for Pico 2 W using std::thread.
More...
#include <assert.h>#include <chrono>#include <new>#include <stdio.h>#include <iostream>#include <thread>#include <functional>#include "pico/stdlib.h"
Classes | |
| class | BaseClass |
| Singleton startup coordinator. More... | |
Macros | |
| #define | LED_DELAY_MS 100 |
Functions | |
| int | pico_led_init () |
| void | pico_set_led (bool led_on) |
| Set the onboard LED state. | |
| static void | led_task () |
LED blink worker executed by std::thread. | |
| static void | log_task () |
Low-priority periodic logger executed by std::thread. | |
| int | main () |
| Application entry point. | |
Variables | |
| std::thread | led_thread |
| Global LED worker thread handle. | |
| std::thread | log_thread |
| Global logger worker thread handle. | |
Detailed Description
C++ FreeRTOS LED test for Pico 2 W using std::thread.
This source tests a Pico 2 W board by blinking the onboard LED while running a low-priority logger task. It uses the Pico C SDK for board/LED access and FreeRTOS as the scheduler, but the application task model is C++-oriented.
Difference from main_freertos.c:
main_freertos.ccreates tasks directly withxTaskCreate()and usesvTaskDelay().main_freertos.cppcreatesstd::threadtasks and usesstd::this_thread::sleep_for(), with priorities assigned from inside the running task viavTaskPrioritySet().
Dependency on FreeRTOS-cpp11:
- The
std::thread/chrono behavior in this file depends on the FreeRTOS-cpp11 integration (FREERTOS_CPP11_SOURCESandFREERTOS_CPP11_INCLUDE_DIRSin CMake). - FreeRTOS-cpp11 provides the libstdc++ threading glue for FreeRTOS so C++ threading APIs map to FreeRTOS primitives.
Macro Definition Documentation
◆ LED_DELAY_MS
| #define LED_DELAY_MS 100 |
Function Documentation
◆ led_task()
|
static |
LED blink worker executed by std::thread.
Behavior:
- Raises its own FreeRTOS priority to
tskIDLE_PRIORITY + 1. - Toggles LED ON/OFF forever with
LED_DELAY_MSperiod.
Usage:
- Spawn via
std::thread{led_task}after FreeRTOS scheduler is running.

◆ log_task()
|
static |
Low-priority periodic logger executed by std::thread.
Behavior:
- Sets its FreeRTOS priority to
tskIDLE_PRIORITY. - Prints a heartbeat log once per second forever.
Usage:
- Spawn via
std::thread{log_task}after scheduler start.
◆ main()
| int main | ( | void | ) |
Application entry point.
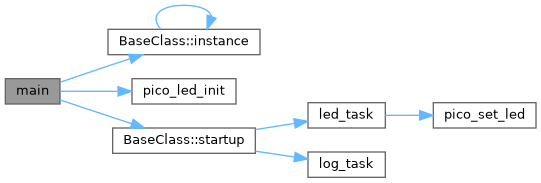
Startup sequence:
- Initialize stdio and LED backend.
- Create a single bootstrap FreeRTOS task.
- Bootstrap task (
BaseClass::startup()) creates detachedstd::threadworkers. - Start scheduler with
vTaskStartScheduler().
How this is used:
- Build and link with Pico SDK, FreeRTOS kernel, and FreeRTOS-cpp11.
- Flash to Pico 2 W to validate C++ thread mapping onto FreeRTOS and LED operation.
- Returns
- Never returns under normal conditions.
◆ pico_led_init()
| int pico_led_init | ( | void | ) |

◆ pico_set_led()
| void pico_set_led | ( | bool | led_on | ) |
Set the onboard LED state.
Usage:
- Call after
pico_led_init()returnsPICO_OK. - Pass
trueto switch LED on,falseto switch LED off.
- Parameters
-
led_on Desired LED state.

Variable Documentation
◆ led_thread
| std::thread led_thread |
Global LED worker thread handle.
Created in BaseClass::startup() and detached immediately.
◆ log_thread
| std::thread log_thread |
Global logger worker thread handle.
Created in BaseClass::startup() and detached immediately.