FreeRTOS + Pico W board validation example. More...
#include <stdio.h>#include "pico/stdlib.h"#include "FreeRTOS.h"#include "event_groups.h"#include "semphr.h"#include "task.h"#include "c7222_pico_w_board.h"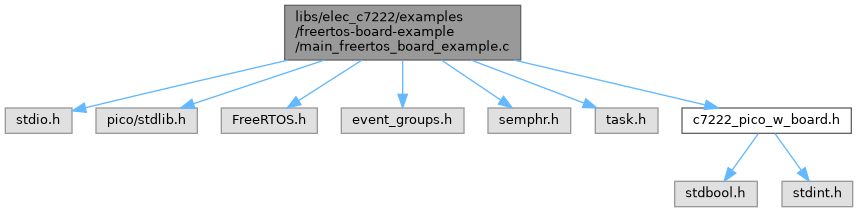
Functions | |
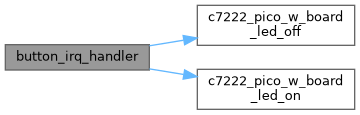
| static void | button_irq_handler (uint32_t gpio, uint32_t events) |
| Shared GPIO IRQ handler for B1 and B2. | |
| static void | task_button_b1 (void *ctx) |
| Task for button B1 (interrupt-driven). | |
| static void | task_button_b2 (void *ctx) |
| Task for button B2 (interrupt-driven). | |
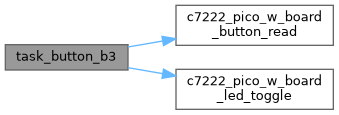
| static void | task_button_b3 (void *ctx) |
| Task for button B3 (polled). | |
| static void | task_button_b4 (void *ctx) |
| Task for button B4 (polled). | |
| static void | task_manager (void *ctx) |
| Management/heartbeat task. | |
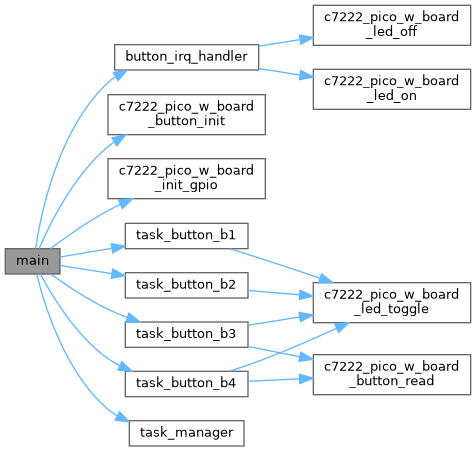
| int | main (void) |
| Entry point for the FreeRTOS board validation example. | |
Variables | |
| static SemaphoreHandle_t | b1_semaphore |
| Binary semaphore used to signal B1 press events from ISR to task. | |
| static EventGroupHandle_t | b2_event_group |
| Event group used to signal B2 press events from ISR to task. | |
| static const EventBits_t | kB2PressedBit = (1u << 0) |
Detailed Description
FreeRTOS + Pico W board validation example.
This example is intended for students who are testing the Pico W board for the first time. It validates the c7222_pico_w_board API and demonstrates foundational FreeRTOS patterns commonly used on microcontrollers.
Learning goals and intent
- Verify that GPIO mapping for LEDs and buttons matches the board layout.
- Show how to combine interrupts with tasks for responsive input handling.
- Compare interrupt-driven inputs (B1/B2) against polled inputs (B3/B4).
- Practice using FreeRTOS synchronization primitives and task scheduling.
What this example demonstrates
- Board GPIO initialization using
c7222_pico_w_board_init_gpio(). - Active-low LEDs: LEDs are driven low to turn ON and high to turn OFF.
- Button input with pull-ups: buttons are configured as inputs with internal pull-ups, so a pressed button reads low.
- FreeRTOS tasks: five tasks run concurrently:
- One task for each button (B1–B4).
- One manager task that prints a heartbeat.
- Binary semaphore: B1 uses a binary semaphore signaled from an IRQ.
- Event group: B2 uses an event flag bit signaled from an IRQ.
- IRQ handling: B1 and B2 use falling-edge interrupts to wake tasks.
- Polling: B3 and B4 are polled to compare interrupt vs polling behavior.
FreeRTOS features shown
- xTaskCreate: create multiple concurrent tasks.
- Binary semaphore: a lightweight signal from ISR to task (B1).
- Event group: flag-based wakeup for a task (B2).
- ISR safe APIs:
xSemaphoreGiveFromISRandxEventGroupSetBitsFromISR. - vTaskDelay: basic cooperative timing and debouncing for polling tasks.
Expected behavior
- Press B1: the B1 task prints a message and toggles LED1_GREEN.
- Press B2: the B2 task prints a message and toggles LED2_GREEN.
- Press B3: the polling task prints a message and toggles LED3_GREEN.
- Press B4: the polling task prints a message and toggles LED3_RED.
- The manager task prints a heartbeat message once per second.
- The IRQ handler lights LED1_RED for B1 and LED2_RED for B2 while pressed.
Notes for first-time testing
- Make sure the board is powered and connected.
- LEDs are active-low on this board; ON means GPIO is 0.
- Button presses generate falling-edge interrupts because the inputs are pulled up and go low when pressed.
- If nothing prints, confirm USB serial is enabled and the baud rate matches.
Function Documentation
◆ button_irq_handler()
|
static |
Shared GPIO IRQ handler for B1 and B2.
Uses ISR-safe FreeRTOS APIs to notify the corresponding task. Also updates indicator LEDs so students can see edge detection immediately.

◆ main()
| int main | ( | void | ) |
Entry point for the FreeRTOS board validation example.
Board GPIO initialization (LEDs + buttons).
IPC primitives (created before enabling IRQs).
Attach IRQs for falling edges on B1 and B2.
Create tasks: one per button + manager.
◆ task_button_b1()
|
static |
Task for button B1 (interrupt-driven).
Waits on a binary semaphore signaled by the GPIO ISR and toggles LED1_GREEN.


◆ task_button_b2()
|
static |
Task for button B2 (interrupt-driven).
Waits on an event-group bit signaled by the GPIO ISR and toggles LED2_GREEN.


◆ task_button_b3()
|
static |
Task for button B3 (polled).
Periodically reads the input and toggles LED3_GREEN on press.

◆ task_button_b4()
|
static |
Task for button B4 (polled).
Periodically reads the input and toggles LED3_RED on press.

◆ task_manager()
|
static |
Management/heartbeat task.
Prints a periodic heartbeat so students can verify the scheduler is running.

Variable Documentation
◆ b1_semaphore
|
static |
Binary semaphore used to signal B1 press events from ISR to task.
◆ b2_event_group
|
static |
Event group used to signal B2 press events from ISR to task.
◆ kB2PressedBit
|
static |